Hi, I'm Marija! I’m a Robotics Software Engineer with a passion for robotics, AI, and automation. I enjoy working with robots, creating innovative solutions, and exploring how technology can help them interact with the world in smarter ways.
Company: CERN
Duration: 2025 - Present
I am working on the development of a robotics software framework at CERN in C++, designed

Company: Spes Robotics
Duration: May 2023 - February 2025
I work on advanced robotics projects, focusing on hardware integration in ROS 2, AI-based

Company: Faculty of Technical Sciences
Duration: October 2023 - February 2025
I teach processor design, FPGA development with VHDL, compilers, and real-time
Company: Memristor Robotics
Duration: 2021 - Present
I am a member of a team competing in the European robotics competition, Eurobot.
Company: Bosch Future Mobility Challenge
Duration: 2023 - Present
I joined the competition as a team member, later became the team lead, and now

Company: RT-RK
Duration: Jul 2022- August 2022
During a one-month internship, I had the opportunity to learn C programming
Institution: University of Novi Sad, Faculty of Technical Sciences
Year: 2024 - Present
Institution: University of Novi Sad, Faculty of Technical Sciences
Year: 2023 - 2024
Institution: University of Novi Sad, Faculty of Technical Sciences
Year: 2019 - 2023
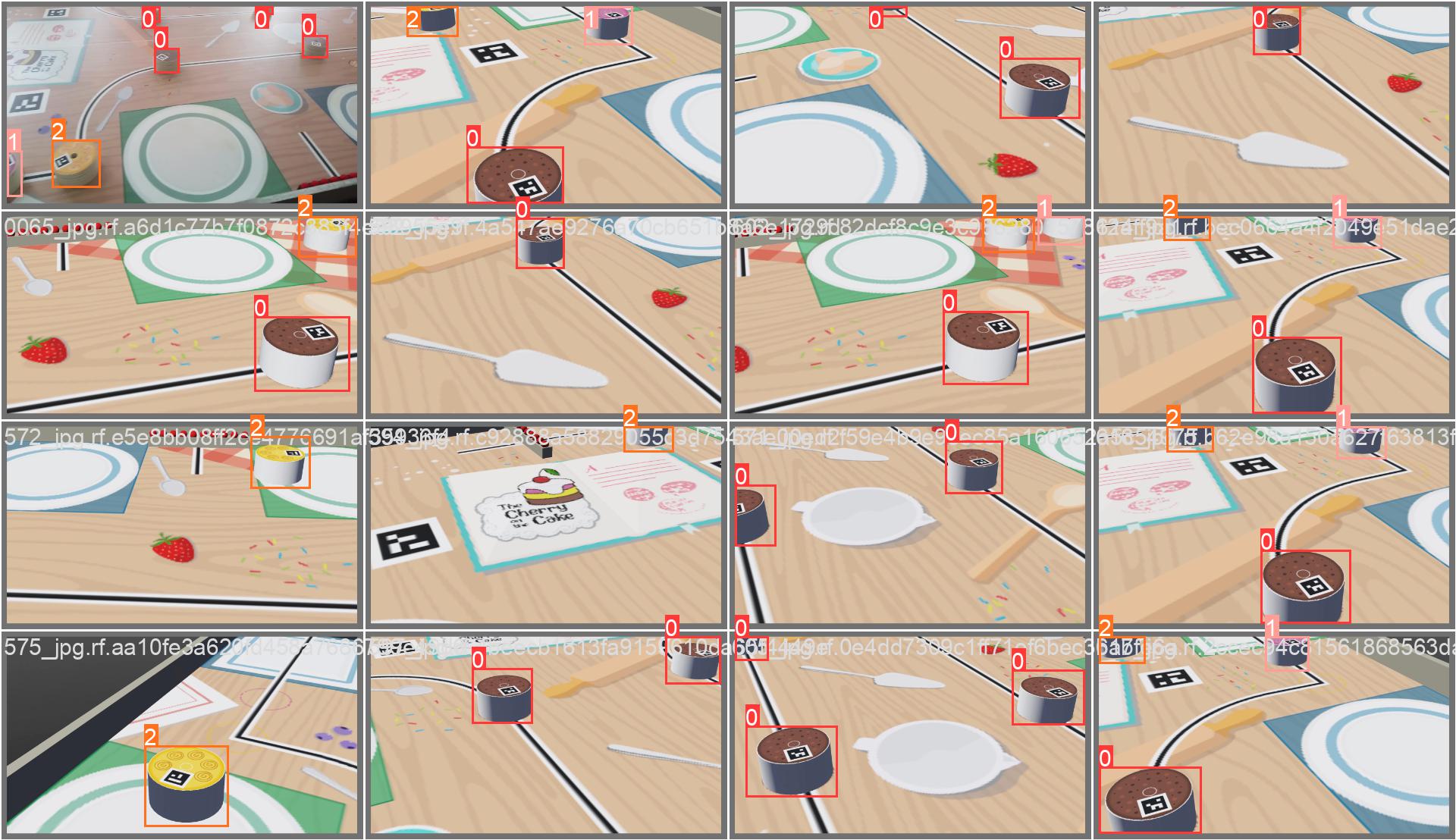
Robo Imitate
The project focuses on imitation learning with diffusion models, featuring ROS 2-based support for training, data collection, and inference. The model learns from demonstrations that show how the task is performed. Simulated in Isaac Sim, the system is designed to adapt to dynamic environmental changes.
Mep3
A ROS2-based platform for autonomous mobile robots, offering easy configuration and support for BLDC and servo motors, LiDAR, and various other devices. The platform supports navigation and path planning, obstacle detection and avoidance, with high-level planning implemented using Behavior Trees.
Visual Navigation
The project consists of a Webots simulation where data is collected for training a YOLO model. The model detects objects, and based on the detection information, the robot navigates to the object. The project is also adapted to work with a physical robot.
Bosch Car (BFMC)
The autonomous vehicle can follow a line, recognize traffic signs, and react accordingly. The code is written in Python, using the YOLO model for object detection and OpenCV for line detection. A Raspberry Pi board and camera were used, along with an STM microcontroller.
SOTIS
The user inputs a description of what they want the robot to do. The Llama model extracts tokens from the entered text, based on which XML code is generated that the robot can execute. A Webots simulation has been created, and the system also supports operation with a real robot.
SSD Object Detection
The project supports training a Single Shot Detector (SSD) model for object detection. A custom dataset has been collected, which can also be downloaded in Pascal VOC format, along with scripts for model evaluation and inference.
Let's connect and build the future of robotics together!